项目3 Rust for Linux & 跨内核驱动框架
1. 树莓派模拟环境搭建
需要Linux系统,以便进行内核开发。可以在物理机上安装Linux,也可以使用虚拟机的形式。(如Windows下的WSL2,或者VirtualBox、VMWare),推荐安装WSL2,相关安装可参考网上资料。关于Linux发行版,我们建议使用Ubuntu LTS 20.04即可,其他如Debian,Arch, Fedora等,注意使用的包管理器和包名与Deb系的略有区别,需要自行解决。
Rust的安装不过多强调,应该都安装了。
- 环境配置
进入Linux环境,项目的开发将在r4l_drivers里面进行,该项目目录将会包含以下内容:
r4l_driver
|- linux_raspberrypi (树莓派linux kernel源码)
|- qemu (qemu模拟环境)
|- 2024-03-12-raspios-bookworm-arm64-lite.img (官方树莓派镜像)
|- firmware (用于挂载镜像分区1)
|- rootfs (用于挂载镜像分区2)
|- userconf (初始用户文件)
|- boot.sh (qemu启动脚本)
通过以下命令创建项目,并作用到环境变量 .bashrc or .zshrc
mkdir /path/to/your/r4l_drivers/
echo "export R4L_DRV=$(pwd)" >> ~/.bashrc
source ~/.bashrc
获取树莓派官方xz镜像文件
cd $R4L_DRV
wget https://downloads.raspberrypi.com/raspios_lite_arm64/images/raspios_lite_arm64-2024-03-13/2024-03-12-raspios-bookworm-arm64-lite.img.xz
xz -dk 2024-03-12-raspios-bookworm-arm64-lite.img.xz
sync
sudo rm 2024-03-12-raspios-bookworm-arm64-lite.img.xz
Qemu9.0 模拟器安装和使用
cd $R4L_DRV
# 安装编译所需的依赖包
sudo apt install autoconf automake autotools-dev curl libmpc-dev libmpfr-dev libgmp-dev \
gawk build-essential bison flex texinfo gperf libtool patchutils bc \
zlib1g-dev libexpat-dev pkg-config libglib2.0-dev libpixman-1-dev libsdl2-dev \
git tmux python3 python3-pip ninja-build
# 下载源码包
wget https://download.qemu.org/qemu-9.0.0.tar.xz
tar -xvf qemu-9.0.0.tar.xz
rm qemu-9.0.0.tar.xz
cd qemu-9.0.0 && mkdir build
cd build && ../configure --target-list=aarch64-softmmu,arm-softmmu
make -j$(nproc)
# 作用到环境变量 `.bashrc` or `.zshrc`
echo "export PATH=\$PATH:$R4L_DRV/qemu-9.0.0/build/" >> ~/.bashrc
source ~/.bashrc
#验证qemu是否安装成功
qemu-system-aarch64 --version
#出现以下信息表示安装成功:
# QEMU emulator version 9.0.0
# Copyright (c) 2003-2024 Fabrice Bellard and the QEMU Project developers
树莓派 linux安装和编译
cd $R4L_DRV
git clone --depth=20 https://github.com/happy-thw/linux_raspberrypi.git
cd linux_raspberrypi
# Requires dependent libraries
apt install libelf-dev libgmp-dev libmpc-dev bc flex bison u-boot-tools
apt install llvm-17 lld-17 clang-17
# 这里选择的是clang-17的版本,rust for linux 最少也要12以上,并且下面的LLVM根据相应的版本选择
# Requires Rust dependent libs
rustup override set $(scripts/min-tool-version.sh rustc)
rustup component add rust-src
cargo install --locked --version $(scripts/min-tool-version.sh bindgen) bindgen-cli
make ARCH=arm64 O=build_4b LLVM=-17 rustavailable
# Rust is available! 即支持rust
make ARCH=arm64 O=build_4b LLVM=-17 bcm2711_rust_defconfig
make ARCH=arm64 O=build_4b LLVM=-17 -j$(nproc)
# (可选项) 修改.config可通过
make ARCH=arm64 O=build_4b LLVM=-17 menuconfig
# (可选项) 保存修改的.config为默认config
make ARCH=arm64 O=build_4b LLVM=-17 savedefconfig && mv build_4b/defconfig arch/arm64/configs/bcm2711_rust_defconfig
# (可选项) 删除之前编译所生成的文件和配置文件
make ARCH=arm64 O=build_4b LLVM=-17 mrproper
# (可选项) 使用rust-analyzer
make ARCH=arm64 O=build_4b LLVM=-17 rust-analyzer
# 没有出现error,则编译成功,相应的kernel镜像文件和设备树文件在以下路径
ls ./build_4b/arch/arm64/boot/Image
ls ./build_4b/arch/arm64/boot/dts/broadcom/*.dtb
启动树莓派模拟环境
cd $R4L_DRV
fdisk -l 2024-03-12-raspios-bookworm-arm64-lite.img
#得到以下信息:
# Disk 2024-03-12-raspios-bookworm-arm64-lite.img: 4 GiB, 4294967296 bytes, 8388608 sectors
# Units: sectors of 1 * 512 = 512 bytes
# Sector size (logical/physical): 512 bytes / 512 bytes
# I/O size (minimum/optimal): 512 bytes / 512 bytes
# Disklabel type: dos
# Disk identifier: 0xd08d1401
# Device Boot Start End Sectors Size Id Type
# 2024-03-12-raspios-bookworm-arm64-lite.img1 8192 1056767 1048576 512M c W95 FAT32 (LBA)
# 2024-03-12-raspios-bookworm-arm64-lite.img2 1056768 5406719 4349952 2.1G 83 Linux
#根据img1 Start的信息,将分区1挂载到firmware下,该分区里面存放了启动引导和配置的相关文件
mkdir firmware
sudo mount -v -o offset=$((512*8192)) 2024-03-12-raspios-bookworm-arm64-lite.img firmware
# 里面可以看到相应的kernel镜像,配置文件和设备树文件
# 卸载
sudo umount 2024-03-12-raspios-bookworm-arm64-lite.img firmware
#另外需要给镜像扩容
qemu-img resize 2024-03-12-raspios-bookworm-arm64-lite.img 4G
qemu-img info 2024-03-12-raspios-bookworm-arm64-lite.img
#创建boot.sh脚本,用于启动qemu,虽然qemu9.0版本开始支持树莓派4B,但是尝试后发现键盘没有作用-.-,因此启动树莓派3B+也能满足项目需求
#以下是boot.sh的内容
#!/bin/sh
kernel_image="linux_raspberrypi/build_4b/arch/arm64/boot/Image"
kenrnel_dtb="linux_raspberrypi/build_4b/arch/arm64/boot/dts/broadcom/bcm2710-rpi-3-b-plus.dtb"
IMG="2024-03-12-raspios-bookworm-arm64-lite.img"
qemu-system-aarch64 \
-machine type=raspi3b \
-m 1024 \
-k en-us \
-dtb $kenrnel_dtb \
-kernel $kernel_image \
-drive id=hd-root,format=raw,file=$IMG \
-append "rw earlycon=pl011,0x3f201000 console=ttyAMA0 loglevel=8 root=/dev/mmcblk0p2 \
fsck.repair=yes net.ifnames=0 rootwait memtest=1 dwc_otg.fiq_fsm_enable=1" \
-serial stdio \
-usb -device usb-kbd \
-device usb-tablet -device usb-net
#启动boot.sh
chmod 777 boot.sh
./boot.sh
# 可能启动会比较慢一点...
结果如下:

附:感兴趣的可以尝试下启动树莓派4B,执行命令如下:
cd $R4L_DRV
qemu-system-aarch64 \
-machine raspi4b \
-cpu cortex-a72 \
-smp 4 \
-m 2G \
-kernel linux_raspberrypi/build_4b/arch/arm64/boot/Image \
-dtb linux_raspberrypi/build_4b/arch/arm64/boot/dts/broadcom/bcm2711-rpi-4-b.dtb \
-drive id=hd-root,format=raw,file=2024-03-12-raspios-bookworm-arm64-lite.img \
-append "rw earlycon=pl011,0x3f201000 console=ttyAMA0 loglevel=8 \
root=/dev/mmcblk1p2 rootfstype=ext4 rootwait memtest=1 dwc_otg.fiq_fsm_enable=0" \
-serial stdio -device usb-kbd -device usb-tablet
加载linux驱动模块
在sample里面已有R4L社区提交的一些驱动模块,在路径./linux_raspberrypi/build_4b/samples/rust下,把rust_print.ko移动到qemu环境里去
cd $R4L_DRV
mkdir rootfs
#根据前面img2 Start的信息,将分区2挂载到rootfs目录,该分区是根文件系统
sudo mount -v -o offset=$((512*1056768)) 2024-03-12-raspios-bookworm-arm64-lite.img rootfs
sudo cp ./linux_raspberrypi/build_4b/samples/rust/*.ko ./rootfs/home/pi/
#卸载
sudo umount 2024-03-12-raspios-bookworm-arm64-lite.img rootfs
#重新启动qemu,此时在qemu环境下就能看到放进来的驱动模块了(想通过网络传输的,但是wsl2好像没这么简单...)
驱动加载演示如下所示
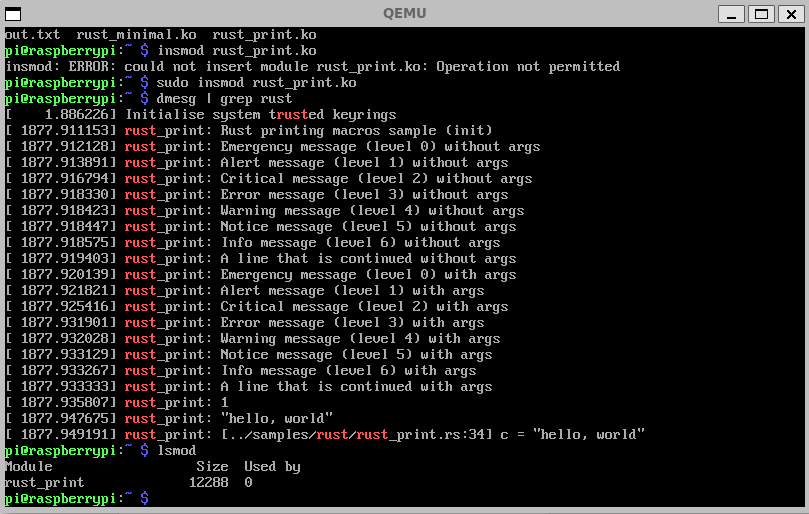
以上就是通过QEMU的树莓派模拟环境去进行驱动开发的过程。
相关问题解决:
1.修改初始密码,在qemu树莓派环境中通过sudo raspi-config进行配置,参考链接:系统配置 | Raspberry Pi 树莓派 (pidoc.cn)
2.键盘输入乱码,是键盘布局不对,树莓派(raspberry pi)是英国产品,默认键盘布局是英国(GB),参考树莓派(raspberry pi)学习4: 更改键盘布局_树莓派配置键盘布局-CSDN博客
2. 树莓派开发板硬件驱动开发
相关硬件:1.树莓派4B开发板
2.HDMI线和显示屏
3.串口TTL转USB模块
4.网线
5.面包板、电阻和LED小灯(不一定需要)
根据官方文档进行镜像烧录,同样选择https://downloads.raspberrypi.com/raspios_lite_arm64/images/raspios_lite_arm64-2024-03-13/2024-03-12-raspios-bookworm-arm64-lite.img.xz,通过HDMI和显示屏查看树莓派硬件启动阶段的相关信息,尤其是无线连接的IP地址,然后通过SSH方式就可以进入树莓派终端了。
linux开源下载&编译方式和前面qemu里面步骤相同。
考虑到无线wifi的ip是动态分配的,可配置有线网络的静态IP,命令如下:
sudo nmcli -p connection show
# Sample static IP configuration:
sudo nmcli c mod 'Wired connection 1' ipv4.addresses 20.6.2.199/22 ipv4.method manual
sudo nmcli con mod 'Wired connection 1' ipv4.gateway 20.6.2.1
sudo nmcli con mod 'Wired connection 1' ipv4.dns "20.6.2.1"
sudo nmcli c down 'Wired connection 1' && sudo nmcli c up 'Wired connection 1'
# 其中IP,掩码,网关,DNS根据自己的情况进行配置
驱动模块通过scp就可以进行传输。
另外还有相关的系统配置问题,可参考树莓派文档进行查看:系统配置 | Raspberry Pi 树莓派 (pidoc.cn)
练习一: 根据上面的方法配置环境,编写和加载HelloWorld的驱动模块。完成后截图。
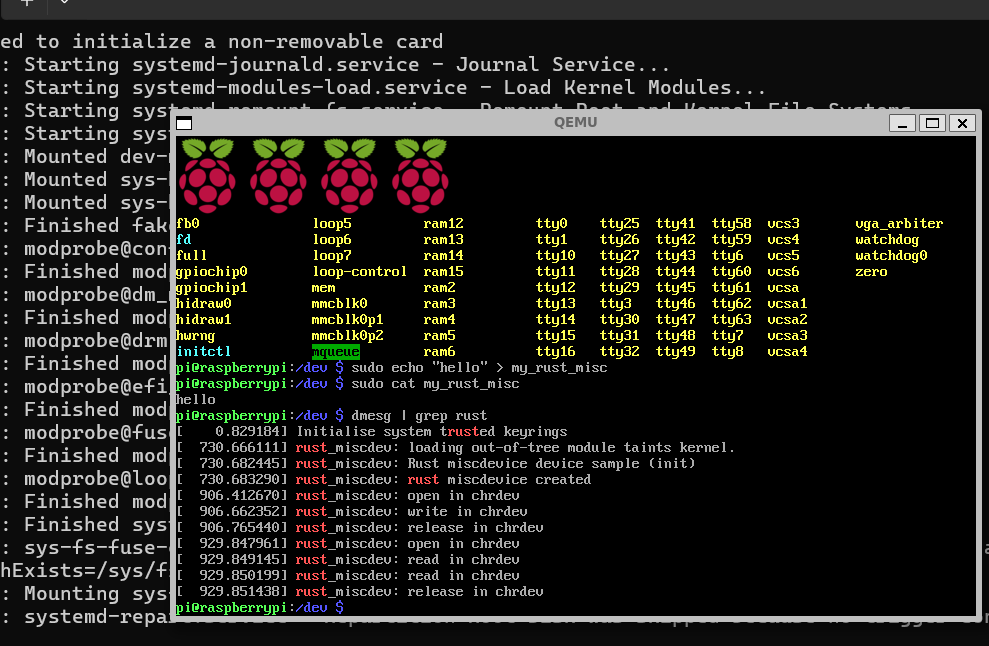
练习二: 实现Miscdev驱动基本读写
远端仓库 代码仓库 更新了练习二的内容,添加了一个samples/rust/rust_miscdev.rs文件,但是没有绑定驱动;
按要求添加配置项,补充内容,使得杂项字符设备可以实现基本读写操作。
提示:里面缺少到miscdev抽象文件可以从rust for linux社区rust分支获取。
测试样例:
//! How to build only modules:
//! make LLVM=-17 O=build_4b ARCH=arm64 M=samples/rust
//!
//! How to use in qemu:
//! / # sudo insmod rust_miscdev.ko
//! / # sudo cat /proc/misc -> c 10 122
//! / # sudo chmod 777 /dev/rust_misc
//! / # sudo echo "hello" > /dev/rust_misc
//! / # sudo cat /dev/rust_misc -> Hello
//!
测试结果如图:
练习三: 跨内核驱动框架下的树莓派4B GPIO点灯实现
远端仓库 代码仓库-练习三 更新了练习三的内容,添加了一个drivers/gpio/exercise-3-gpio目录,包括C语言的树莓派4B点灯的参考代码,以及通过Cargo new的一个跨内核驱动框架Adapter driver的目录,里面提供了练习作业的相关说明;
参考代码链接: DesignWare_APB_GPIO Adapter Driver模块 以及 DesignWare_APB_GPIO Pure Driver模块,参考drivers/gpio/gpio-dwapb.c的C代码实现
注意事项:
只支持驱动模块build-in,无法基于Cargo生成.ko文件
编译跨内核的驱动时,无法使用多线程并行编译(不能make -jx),由于Cargo的依赖重定位问题导致(建议先编译内核,然后修改跨内核的驱动配置项,单线程编译)
需要在rust/cargo_driver/Cargo.toml中添加adapter层的dependencies,例如:
[dependencies] gpio_rpbled_linux_adapt = { path = "../../drivers/gpio/exercise-3-gpio/gpio-rpbled-adapter"}
以及Rust/makefile 476行中增加binaries,adapter层Crate的name(可在改配置后面追加)
# When adding a cargo project, you must add the binaries # that need to be excluded here. # They will be removed when the cargo_driver is actually generated. CARGO_EXCLUDE_OBJ := gpio_rpbled_linux_adapt
在树莓派中运行Arceos:
克隆这个仓库,生成ArceOS代码仓库:https://github.com/chenlongos/arceos
在ArceOS目录下,输入:
make A=apps/cli ARCH=aarch64 PLATFORM=aarch64-raspi4 LOG=debug
编译出ArceOS在raspi4上的.bin镜像。
生成kernel8.img文件
git clone https://github.com/chenlongos/rust-raspberrypi-OS-tutorials.git # 在在06_uart_chainloader目录下,执行: BSP=rpi4 make
便可以看到生成了一个kernel8.img文件
把 kernel8.img 和 raspi4_aarch64-raspi4.bin 通过 cat 命令拼接到一个 bin 文件中,仍然取名为 kernel8.img:
# 在ArceOS目录下执行 cat ../rust-raspberrypi-OS-tutorials/06_uart_chainloader/kernel8.img apps/cli/cli_aarch64-raspi4.bin > kernel8.img
已有树莓派开发板:把新生成的 kernel8.img 拷贝到 sd 卡上,替换原来的kernel8.img,上电启动。
在qemu模拟器中运行:
# 在qemu中运行kernel8.img qemu-system-aarch64 -m 2G -smp 4 -cpu cortex-a72 -machine raspi4b -nographic -kernel arceos/kernel8.img
GPIO在Arceos的点灯驱动可以参考: https://github.com/happy-thw/arceos/commit/2f5aae5b1d74ac55cd3cee4f0e8240acb9c99618 ;
更详细的信息参考: ttps://chenlongos.com/raspi4-with-arceos-doc/chapter_1.1.html测试样例:
在R4L里面还是通过msicdev设备驱动操作gpio点灯,选取的Gpio Pin引脚随意,但是需要说明寄存器和引脚的关系,相关数据手册查看官网和网上资料
sudo echo 1 > /dev/rust_misc # 灯亮 sudo echo 0 > /dev/rust_misc # 灯灭
在Arceos里面通过shell里面新增cmd操作gpio点灯,达到循环亮灭的效果
Arceos和R4L中使用同一份Pure driver代码,只完成R4L部分获得该练习作业50%的分值。